


Labyrinth was an early project for a Design of Mechatronic Systems Class. The challenge was to design and build a robot that would be carry a 500 gram payload through a maze. The robot could only use passive electrical components, carry it’s own power, and had to be compatible with a wired joystick controller for navigation. I decided to make my robot only have two points of contact with the ground to improve maneuverability in the maze. In addition, I challenged myself to make the entire bot contained within its wheels, despite strict size restrictions. The final product was a lasercut acrylic and standoff chassis, with 3D-printed outer wheels.
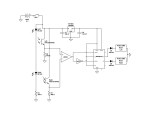
After demonstration, I designed a circuit to allow autonomous navigation through the maze, using infra-red leds and phototransistors (see schematic in gallery).
